
En este artículo exploraremos un proyecto de hacking automotriz en el que controlamos el ventilador de alta velocidad (HFC) de un Ford en función de la temperatura del refrigerante. Para ello, utilizamos Python, un adaptador OBD-II ELM327 y el análisis de paquetes con Wireshark.
Este proyecto me permitió aprender sobre comunicación CAN, protocolos automotrices y cómo combinar herramientas de red y programación para resolver problemas prácticos.
El objetivo inicial era entender el mecanismo de activación y desactivación del ventilador de alta velocidad. Investigando en la red, descubrí que el PCM (Powertrain Control Module) utiliza el protocolo J2190 sobre CAN a 500 kbps.
El Unified Diagnostic Services (UDS) es un protocolo utilizado en diagnósticos automotrices que permite la comunicación con las ECUs. Dentro de UDS, existen diferentes modos que permiten leer datos, ejecutar pruebas y enviar comandos.
Modo 22 – Lectura de Datos Específicos (Read Data by Identifier):
Se usa para consultar parámetros en tiempo real del vehículo, como la temperatura del refrigerante o la velocidad del motor. Ford emplea un esquema de PIDs extendidos, lo que significa que algunos identificadores pueden diferir del estándar.Modo 2F – Control de Rutinas (Routine Control):
A diferencia del modo 22, que solo permite la lectura de datos, el modo 2F se usa para ejecutar rutinas específicas dentro de la ECU.
Dado que Ford utiliza identificadores de datos específicos y PIDs extendidos, es fundamental analizar paquetes CAN o usar herramientas avanzadas de diagnóstico para comprender y manipular correctamente los comandos que controlan los distintos sistemas del vehículo.
Recurrimos a FORScan, una aplicación especializada en diagnósticos avanzados para vehículos Ford, que resultó invaluable para nuestro proyecto. Con FORScan conectado al coche a través del adaptador ELM327, pudimos explorar los módulos del PCM y confirmar los PIDs (Parameter IDs) soportados.
Para obtener los comandos exactos, recurrimos a Wireshark, una herramienta poderosa para analizar tráfico de red, adaptada en este caso para capturar paquetes Bluetooth.
Inicialmente, capturamos un mensaje que parecía ser el comando para encender el HFC:
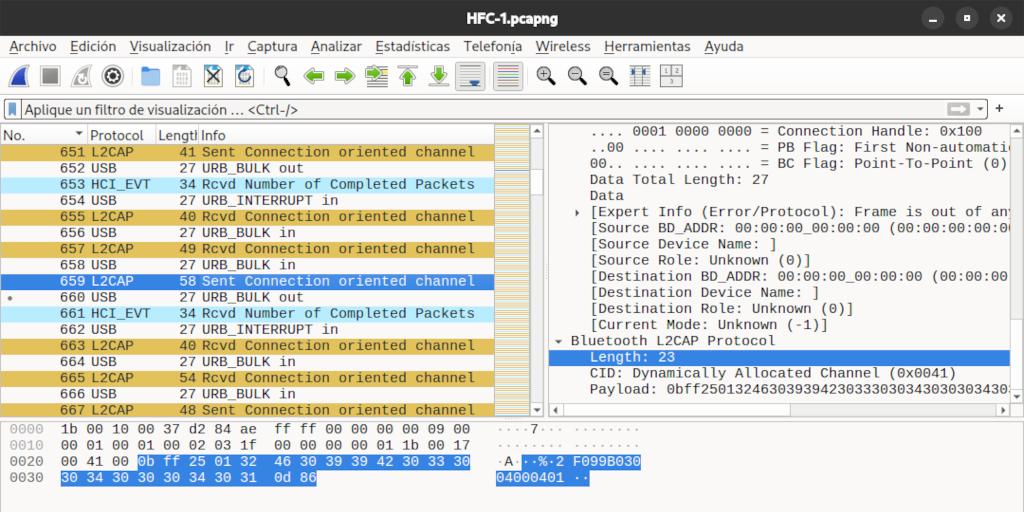
Payload: 00011b00170041000bff250132463039394230333030343030303430310d86
- Encabezado L2CAP:
1b 00(Longitud: 27 bytes).10 00 37 d2 84 ae ff ff 00 00 00 00 09 00(Encabezado Bluetooth/L2CAP, probablemente dirección y canal).00 01 00 01 00 02 03 1f 00 00 00 00 01(Configuración L2CAP).1b 00 17(Longitud del canal: 23 bytes).00 41(Canal L2CAP:0x0041, usado para enviar comandos al PCM).
- Comando:
0bff250132463039394230333030343030303430310d86
0b ff 25 01: Encabezado o metadatos L2CAP/RFCOMM.32 46 30 39 39 42 30 33 30 30 34 30 30 30 34 30 31: Esto es el comando en ASCII:2F099B03004000401.
2F→ Prefijo (posiblemente parte del ID CAN o Service 2F de UDS).099B→ PID o identificador CAN relacionado con el ventilador (coincide con el PID22099B1usado para leer el estado).03→ Posiblemente un byte de control o modo.00 40 00 40 01→ Datos específicos del comando (diferente de04004001en nuestro payload actual).0d(\r): Terminador.86: Posible checksum.
El payload 2F099B03004000401 parece ser el comando correcto para activar el ventilador (HFC ON), basado en la captura.
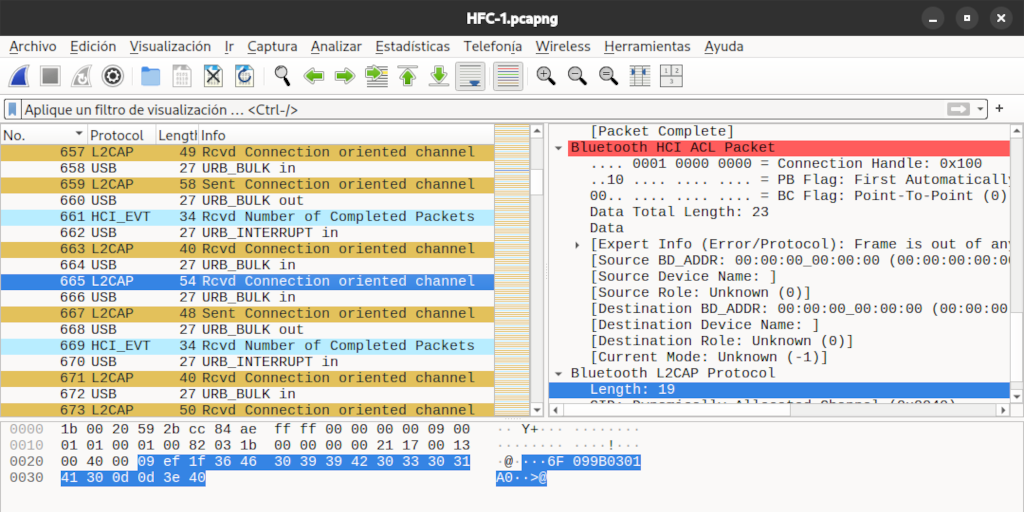
Obtenemos una respuesta a este comando:
Payload: 002117001300400009ef1f3646303939423033303141300d0d3e40
- Encabezado L2CAP:
00 21: Longitud del mensaje (33 bytes).17 00 13 00 40 00: Configuración L2CAP, canal0x0040(respuesta del PCM).09 ef 1f: Metadatos adicionales.
- Respuesta:
3646303939423033303141300d0d3e40
36 46→6F(respuesta al modo 2F de UDS).30 39 39 42→099B(identificador CAN/PID del ventilador).30 33 30 31 41 30→031A0(datos de la respuesta).0d 0d→\r\r(retornos de carro).3e 40→>@@(ojalá saberlo).
Analizando toda la información recopilada, si deseamos validar esta teoría sobre un componente inofensivo del vehículo, podríamos ejecutar el siguiente código, diseñado para monitorear la temperatura del líquido refrigerante mediante un protocolo específico de Ford que utiliza el modo 22. Este código consultará el PID 22F4051 para obtener los datos correspondientes.
En primer lugar vamos a conectarnos al dispositivo bluetooth y vincularlo con un puerto serial.
Inicia el Bluetooth:
| |
Dentro de bluetoothctl, ejecuta:
| |
Busca tu adaptador OBD-II (puede aparecer como “OBDII”, “ELM327”, o similar). Anota su dirección MAC (formato XX:XX:XX:XX:XX:XX).
Emparejar el dispositivo:
| |
Si pide un PIN, el predeterminado suele ser 1234 o 0000. Luego:
| |
Vincular al puerto serial: Sal de bluetoothctl (exit) y vincula el dispositivo a /dev/rfcomm0:
| |
Verificar: Comprueba que el puerto existe:
| |
Deberías ver /dev/rfcomm0.
NOTA Si reinicias el programa y el puerto está ocupado, libera /dev/rfcomm0 manualmente: sudo rfcomm release 0
| |